|
В настоящее время военно-техническая политика США направлена на создание кораблей, которые должны обеспечить военное превосходство американского флота над любым противником на океанских театрах военных действий и в прибрежных районах, что позволит ему осуществлять поддержку сухопутных операций при действиях совместно с другими видами вооруженных сил. |
Атомные подводные лодки (ПЛА), согласно военно-технической политике ВМС США и стран НАТО, являются ключевым компонентом при завоевании господства на море и нанесении ударов по берегу. Для успешного выполнения расширенного перечня задач при ведении боевых действий, в том числе с использованием сетевых средств, требуется существенное увеличение боезапаса и номенклатуры полезной нагрузки без роста водоизмещения ПЛА.
С целью высвобождения объема под полезную нагрузку в США и странах НАТО развернуты НИОКР, в рамках которых изучается возможность создания перспективных модульных подсистем кораблей, в том числе и энергетической системы, масса и объем которой, при сохранении существующей мощности, были бы значительно ниже современных аналогов.
Перспектива развития подводных лодок определяется довольно широким спектром направлений, по которым можно совершенствовать конструкцию ПЛА. При этом к двум направлениям следует присмотреться внимательнее, поскольку в будущем они могут принципиально изменить современный архитектурный облик ПЛ. К этим направлениям относятся увеличение полезной нагрузки и ее номенклатуры, а также поэтапная реализация концепции модульной ПЛ на базе передовых технологий и компоновочных схем, передовых методов проектирования и строительства.
|
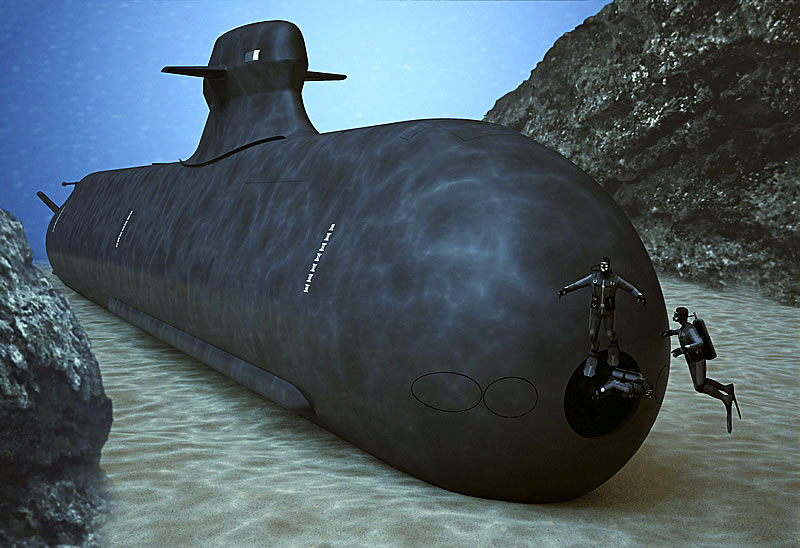
Доставка боевых пловцов – задача, которую ПЛАРК типа Ohio решают уже сегодня. |

ВМС продолжают испытывать необходимость в повышении боевого потенциала подводных лодок, а также в более скрытном и быстром их развертывании. Решение этих проблем специалисты видят в расширении номенклатуры полезной нагрузки за счет оснащения лодок автономными необитаемыми подводными аппаратами (АПА), обитаемыми подводными аппаратами (ОПА) и беспилотными летательными аппаратами (БЛА). Однако пока имеет место большое разнообразие классов и типов таких аппаратов, к тому же они разрабатываются независимо от самих носителей, т.е. подводных лодок. Как результат имеется много технологических и конструктивных сложностей по размещению на борту существующих подлодок АПА, ОПА и БЛА. В данной статье рассматриваются современные и концептуальные варианты размещения и применения аппаратов с борта ПЛ, исследуются потенциальные возможности этих инноваций с учетом интерфейса ПЛ, обеспечивающего внутреннее и внешнее размещение и техническое обслуживание аппаратов.
Для решения поставленной задачи проектировщикам будет необходимо на первых этапах конструирования провести исследования и определиться с требованиями к будущим средствам ведения подводной войны и рассмотреть роль АПА, ОПА и БЛА при проведении боевых операций.
Исходя из этой постановки вопроса, зарубежными проектировщиками была рассмотрена целая серия концептуальных вариантов многоцелевых подводных лодок как носителей аппаратов. Также был рассмотрен весь перечень существующих и перспективных (т.е. находящихся в разработке) аппаратов. Проблемы размещения больших и эффективных АПА были оценены как серьезные и трудные.
Для лучшего понимания стоящих задач зарубежными разработчиками были изучены возможности АПА и оценены их основные характеристики, такие как диапазон скоростей и автономность. Полученные диапазоны тактико-технических характеристик АПА, ОПА и БЛА и соответствующие требования к интерфейсу позволили проанализировать различные архитектурные варианты ПЛ.
Базируясь на этом анализе, удалось получить несколько наиболее оптимальных вариантов внешних форм и пространственных расположений подсистем ПЛ (архитектурных вариантов ПЛ). Эти варианты затем сравнили в показателях совместимости с АПА, ОПА и БЛА по требуемым интерфейсу, стоимости и соответствия требуемым боевым возможностям. На данном этапе исследований проработаны концептуальные проекты различных вариантов субмарин – носителей аппаратов.
КОНЦЕПЦИИ ДО 2035 ГОДА
В настоящее время создано довольно много подводных аппаратов и беспилотников, которые могли бы повысить боевые возможности подлодок. Однако возможности по размещению и пуску АПА и БЛА серьезно ограничивают средства запуска, имеющиеся на борту ПЛ, и в первую очередь – 533-мм торпедные аппараты (ТА), которые фактический являются стандартом для ПЛ ВМС всех ведущих зарубежных стран на протяжении последних ста лет. На сегодня традиционные системы оружия, находящиеся на борту ПЛ, включают тяжелые торпеды, мины, противокорабельные крылатые ракеты и крылатые ракеты для поражения береговых целей. Основной вариант применения этих систем – пуск из 533-мм торпедного аппарата и установок вертикального пуска (УВП) при хранении этого боезапаса на стеллажах в первом отсеке, т.е. внутри прочного корпуса или в УВП.
|
Наружное размещение док-камер на модернизированных лодках типа Ohio снижает их гидродинамические характеристики. |

Требования к системам носителя
АПА и ОПА требуют наличие различных системных интерфейсов во время каждого этапа материально-технического обслуживания и боевого применения. Функциональная декомпозиция всего цикла их обслуживания и боевого применения может быть использована для уточнения требований к интерфейсу носителя.
Требования по обслуживанию
В потенциале есть много общего в требованиях по материально-техническому обслуживанию АПА и ОПА. Но ОПА включает наиболее сложные системные требования, особенно когда это связано с сухой палубной доковой камерой (гаражом, ангаром – Dry Deck Hangar, DDH), с наличием множественной системы подачи воздуха в обеспечение безопасности, дыхания пловцов и операторов.
Внедрение топливных элементов, использующих жидкий кислород и различные углеводородные топлива как на АПА, так и на ОПА, потребует выдвижение дополнительных требований по безопасности хранения и доступа к топливным компонентам. Эти проблемы будут становиться все более сложными, если аппараты будут размещаться внутри отсеков, наряду с оружием и боеприпасами.
|
ПЛА типа Virginia Block III получили заимствованые у ПЛАРБ УВП большого диаметра. |
Требования по размещению
Ключевой проблемой при размещении АПА на борту атомной подводной лодки-носителя (по западной терминологии – Ship Submersible Host Nuclear, SSHN) является принятие решения, где (внутри или снаружи) и как их разместить. При размещении за бортом системы будут постоянно находиться в воде. В том числе при повышенном давлении, при воздействии ударных нагрузок. Если они будут находиться не под обтекателем корпуса ПЛ, то они будут увеличивать сопротивление и гидродинамический шум. Кроме того, они не будут удобны для технического обслуживания и перемещения. Преимуществом расположения вне корпуса является снижение стоимости и сложности, обусловленное уменьшением числа переходников через прочный корпус, упрощением системы дифферентовки, вывешивания и средств управления, и в целом снижение стоимости сравнительно дорогого прочного корпуса.
На ближайшую перспективу предусматривается реализация большей гибкости (адаптивности) при наличии небольших объемов для размещения аппаратов, что сказывается на количестве кандидатов на забортные системы и их проектирование. Сами забортные системы пока недостаточно проработаны для того, чтобы их размещать вне корпуса без средств, обеспечивающих регулярный доступ и техническое обслуживание.
Требования к процедуре и системам запуска и возврата
Запуск и возврат – это ключевые проблемы при развертывании забортных систем. Предполагаемые требования для них включают:
– низкий уровень ручного управления (автоматизация);
– простота (низкая стоимость);
– надежность;
– гибкость;
– минимум нагрузки на действующий носитель, т.е. возможность пуска и приема без изменения режима движения ПЛ (без ее остановки).
Предлагаемые механизмы должны быть в состоянии в автоматическом режиме осуществлять захват АПА и установку его в доковое сооружение с помощью «руки» или привязного робота, или аппарат сам должен реализовать процедуру докования и стыковки, что особенно важно для больших аппаратов. Факторы, которые будут влиять на облегчение процесса возвращения, включают: ориентацию носителя относительно забортной системы; близость «руки робота»; гидродинамические условия обтекания, позволяющие осуществлять операцию по захвату и возвращению аппарата на штатное место хранения при соответствующих скоростях хода ПЛ.
|
Автономные необитаемые подводные аппараты выполняют большое количество различных задач. Их применение позволяет существенно повысить боевой потенциал состоящих на вооружении подводных лодок. |
ИНТЕРФЕЙС ТОРПЕДНЫХ АППАРАТОВ
Используемые современные носовые 533-мм ТА имеют систему управления и пуска, способную осуществлять все необходимые манипуляции с АПА средних размеров. Кроме того, размещение оружия на стеллажах в отсеке ПЛ создает удобные и благоприятные условия для хранения и технического обслуживания аппаратов. Тем не менее имеет место ограничение АПА по диаметру и длине, а также сохраняется проблема приема аппаратов вплоть до необходимости остановки и зависания ПЛ для процедуры захвата и установки аппарата в ТА (новейшие ПЛА способны зависать на месте с точностью удержания местоположения в 1 м). Для этого ПЛ должна иметь роботизированную «руку» или привязного робота (ROV).
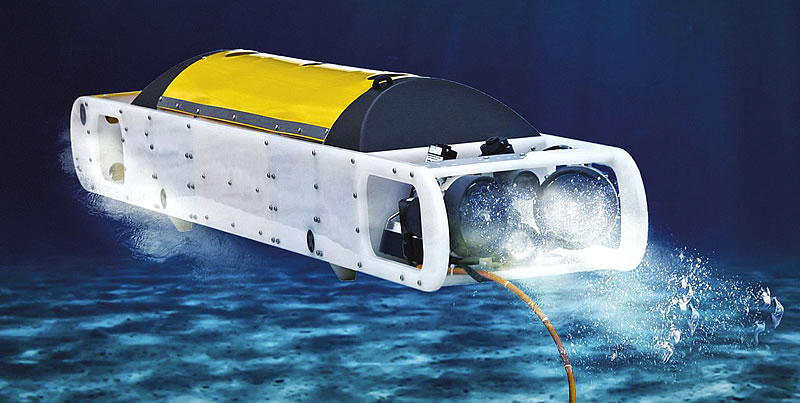
Плодотворность этого направления можно проиллюстрировать на примере внедрения шведской фирмой SAAB нового робота SUBROV, предназначенного для применения с борта ПЛ нового поколения А26 ВМС Швеции. Данный робот объединил большинство технологий, применяемых на семействе аппаратов фирмы SAAB под названиями Double Eagle и Seaeye WROV.
SUBROV способен:
– выполнять операции осмотра корпуса ПЛ на предмет повреждений или обследования окружающего ее пространства для выявления препятствий, рельефа дна, наличия мин и т.д.;
– обеспечивать радиосвязь и наблюдение за надводной и воздушной обстановкой;
– обеспечивать противоминную безопасность;
– доставлять АПА на борт ПЛ;
– скрытно выполнять различные операции.
SUBROV максимально использует существующие на подводных лодках интерфейсы, например, для погрузки, заряжания АБ, пуска аппарата.
|
Носовая труба большого диаметра – одна из инноваций в шведском проекте ПЛ А26. |
Одной из важнейших характеристик ПЛ является ее скрытность. Но как только лодка, находясь на перископной глубине, поднимает выдвижные устройства, она становится уязвимой, так как резко повышается вероятность ее обнаружения. Если же сенсор или антенна появятся на поверхности моря в нескольких километрах от ПЛ, находящейся на большой глубине, то риск ее обнаружения значительно снизится. Радиоэлектронные средства и сенсоры в носовой оконечности могут заменяться и использоваться в различных комбинациях, как и антенны связи, в зависимости от задачи, условий и требований. В целом, например, это позволяет выставить на поверхности устройство для связи на 20-километровом удалении от ПЛ.
Другой инновацией, реализованной на шведской ПЛ проекта А26, является внедрение носовой трубы большого диаметра. В результате торпедный отсек был оснащен оборудованием, позволяющим работать не только с торпедами, ракетами и минами, но и с АПА, привязными роботами, с сенсорами, навигационными средствами и транспортными средствами для пловцов. Применение трубы большого диаметра в меньшей степени ограничивает пользователей и в данном случае позволяет запускать большие АПА и одновременно служить большой шлюзовой камерой, обеспечивая выход и возвращение пловцов.
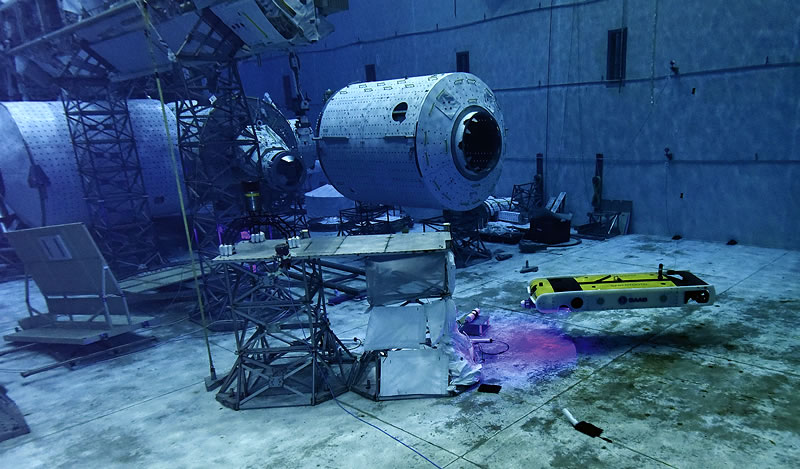
УСТАНОВКИ ВЕРТИКАЛЬНОГО ПУСКА (УВП)
Это способ размещения разнообразной полезной нагрузки, не изменяющий принципиально архитектурного облика современных ПЛ. Вертикальные трубы большого диаметра применены на ПЛА типа Virginia Block III (заимствованы у ПЛАРБ). Расположенные в носу вне прочного корпуса трубы пусковых установок позволяют осуществлять сухое хранение без воздействия воды и забортного давления, при этом они встроены в обтекаемые обводы корпуса корабля. Уже были проведены испытания блока вертикального подъема во взаимодействии со средством доставки боевых пловцов мокрого типа Mk8. В настоящее время дорабатывается механизм перевода плавучего средства доставки в горизонтальное положение. Размещение такого механизма в модуле и его установка может привести к отказу от размещения на верхней палубе сухого контейнера под средства сил специальных операций.
|
Варианты конфигурации БЛА, запускаемых с помощью УВП. |

|
|

При данной компоновке одна из проблем (общая для лодок) связана с некоторыми изменениями проекта или его модификацией. Это обусловлено особенностью носовой оконечности из-за расположенной там антенны ГАС и горизонтальных рулей с их приводами, а также цистерн главного балласта, средств буксировки и постановки на якорь, а также баллонов воздуха высокого давления. Кроме того, рубка может служить помехой в ходе пуска и приема аппаратов. Расположение УВП за рубкой внутри прочного корпуса также имеет свои недостатки, но они менее значительны и преодолимы. Так, например, после 2019 г. на ПЛА типа Virginia предусматривается устанавливать дополнительную секцию для ПКР Tomahawk из четырех УВП с 28 ракетами.
Однако число добавляемых пусковых труб на ПЛА типа Virginia будет ограничено имеющимися в распоряжении пределами, выраженными в терминах: масса, запас плавучести, дифферентовка и вывеска ПЛ, ее маневренность и управляемость.
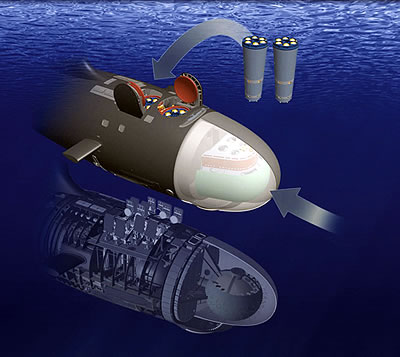
В целом, учитывая большой диаметр этих ПУ и интенсивные работы по совершенствованию УВП для ПЛАРБ нового поколения, можно ожидать, что для ПЛ большого водоизмещения они будут доработаны и приспособлены для пуска и возвращения практически всех систем оружия, которые будут состоять на вооружении таких ПЛ, во всяком случае, в ВМС США в период до 2035-2040 гг. Это можно проиллюстрировать результатами разработок, связанных с переоборудованием ПЛАРБ Ohio в ПЛАРК (атомная подводная лодка с крылатыми ракетами) в рамках программы PLUSNet (Persistent Littoral Undersea Surveillance Network – «Сеть непрерывного контроля подводной обстановки в прибрежных акваториях»). Способность ПЛАРК развертывать и обслуживать сеть скрытно вблизи ключевых географических районов является основным преимуществом. Множество АПА и стационарных модулей могут существенно повысить возможности ПЛАРК по наблюдению и осуществлению скрытной связи.
Размещение внутри прочного корпуса может обеспечить возможность доступа к аппаратам при хранении. Эта система УВП на современных ПЛ может, по-видимому, быть модифицирована как часть корпусного разъема, или даже отдельные пусковые трубы могут быть скомпонованы в модули, как, например, для ПЛАРБ нового поколения типа Columbia ВМС США.
|
Подводный робот SUBROV разработки компании SAAB. |
КОНЦЕПЦИИ С ВОЗМОЖНОСТЬЮ РЕАЛИЗАЦИИ ПОСЛЕ 2039 ГОДА
Итак, из-за ограничений, налагаемых реально существующими конструктивными особенностями подводных лодок и существующим интерфейсом, реализация функционирования АПА различных типов и классов (особенно больших) с борта подводных лодок в ближайшей перспективе будет сопряжена с определенными трудностями.
Интерфейсная концепция, реализуемая в районе миделя ПЛ
Внедрение интерфейсного миделя как бы продолжает линию по минимизации размещения систем и оборудования в носу и корме. Наиболее сложной задачей при этом является прокладка маршрута перемещения аппаратов во внутреннем пространстве от пунктов, где осуществляется техническое обслуживание, или универсальное временное хранение в гараже, который не ухудшает гидродинамику, т.е. не выходит за внешние обводы корабля. Это достигается путем внедрения вторичной структуры с пространством, свободным для доступа воды в районе миделя ПЛ, с одновременным наличием доступа во внутренний гараж по направлению в нос через доковую (шлюзовую) камеру диаметром 1,5 м с выходом и входом, обеспечивающими работу с большими аппаратами.
|
В настоящее время при создании АПА конструкторы ориентируются на 533-мм торпедный аппарат как на основное средство запуска. |

Применительно к возврату АПА проработаны сценарии, в которых аппарат будет подходить к мидельному интерфейсу корабля с кормы и захватываться у борта. Захваченный аппарат будет задвинут в приемное устройство, а затем во внутреннее гаражное пространство, где возможно проведение материально-технического обслуживания. Внутренний многоцелевой гараж обеспечивает сухую и управляемую среду для:
– хранения систем погружения и вспомогательного оборудования;
– ремонта и периодического материально-технического обслуживания;
– перезарядки АБ или пополнения запасов топлива;
– программирования и загрузки данных в бортовую систему управления;
– промывки.
Гараж также может обслуживать системы управления и пуска аппаратов из носовых 533-мм ТА, размещать средства собственной защиты. Логистическая выпускная шахта большого диаметра – Logistic Escape Trunk (LET), адаптирована для загрузки и перемещения АПА и взаимодействует с обеспечивающим оборудованием и оружием в течение всего жизненного цикла корабля.
Вторичное устройство в районе миделя предоставляет достаточный объем для долговременного забортного размещения аппаратов и обеспечивает доступ к ним по мере необходимости. Кроме того, оно может обеспечить размещение других систем, например, БЛА в кассетах УВП или роботов, которые можно использовать как систему возвращения оборудования и забортную систему спасения и возврата.
Мидельный интерфейс позволяет быстро и легко загружать большие АПА внутрь ПЛ и обеспечивает большое пространство для внутреннего хранения до четырех больших АПА, а также оставляет свободным значительное внешнее пространство в рамках корпуса обтекания ПЛ. Кроме того, появляется возможность проведения минимального технического обслуживания, такого как зарядка аккумуляторов, заправка топливом, загрузка данных и программирование, без впуска АПА внутрь ПЛ, что увеличит возможности аппаратов за счет быстрого их обслуживания и выпуска. Это дает, в свою очередь, большую свободу действий ПЛ.
Недостатком мидельного интерфейса является значительное увеличение водоизмещения и стоимости ПЛ, обусловленное дополнительными структурами и их сложностью.
Концепция кормового интерфейса
В теории кормовой интерфейс должен обеспечить свободный доступ АПА в кормовую оконечность, т.е. возврат аппарата во время движения ПЛ на постоянном курсе. Устройство состоит из универсального кормового гаража, вход в который обеспечивается шлюзовой камерой входа и выхода. Для минимизации числа интерфейсов воздух/вода, стоимости и водоизмещения ПЛ по сравнению с вариантом мидельного интерфейса, проект не имеет носового отсека для хранения оружия. В результате было принято допущение, что большинство наступательных задач будет обеспечиваться за счет применения развертываемых АПА, размещаемых в гараже. Размещение гаража в корме дает некоторые выгоды при дифферентовке. Однако большая шлюзовая камера на оси существенно нарушает общепринятые нормы расположения оборудования и систем в кормовой оконечности, к которым относятся:
– главная балластная система;
– кормовые рули с приводами;
– движители;
– кормовая оконечность и связанная с ней гидродинамика и сигнатура;
– вторичные движители;
– системы постановки и выборки буксируемых антенн.
Для расположения в корме большой шлюзовой камеры и гаража необходимо применить конструкцию, равнопрочную прочному корпусу, и разместить в данном районе цистерны главного балласта, т.к. сдвоенный прочный корпус не является общепринятой нормой при проектировании. Для размещения входной/выходной шлюзовой камеры в кормовой оконечности было необходимо внедрить безвальный движитель на основе электродвигателя с кольцевым приводом, дополненный полностью интегрированной электрической движительной системой – Integrated Full Electric Propulsion (IFEP).
Данная концептуальная проработка имеет определенные выигрышные моменты, касающиеся ориентации интерфейса на подходящий аппарат во время его приема и минимизации интерфейса, уменьшающего размеры ПЛ и ее стоимость по сравнению с мидельной концепцией SSHN. Недостатком является гидродинамический поток в корме, который плохо влияет на захват аппарата. Это влияние может быть уменьшено на порядок за счет использования вторичных движителей во время подхода аппарата или его захвата на расстоянии от ПЛ через управляемый привязной аппарат и стыковочное устройство, близкородственное системе заправки в воздухе.
Концептуальная проработка проекта быстрореконфигурируемого модульного корабля
Быстрореконфигурируемые ПЛ могут иметь более широкие боевые возможности, чем дорогие многоцелевые корабли. Они будут способны обеспечить максимальную эффективность за счет уменьшения времени вывода корабля из состава действующих сил в сравнении с многоцелевыми или специализированными кораблями. Это реализуется за счет конструирования систем, выполняющих боевые задачи, как систем легко заменяемых, техническое обслуживание и обновление которых становится значительно проще и дешевле. Если дополнительные соответствующие модули имеются в арсенале (на берегу), то достаточно просто заменить израсходованный или вышедший из строя, или морально устаревший модуль на новый, и в результате немедленно вернуть корабль в боевой состав. Использованные модули затем могут поступить на техническое обслуживание в арсенале или могут быть возвращены на завод-изготовитель. Такой подход удешевляет и повышает качество выполняемых работ, так как ремонт и техническое обслуживание выполняются на берегу, т.е. с демонтированным модулем, а не на борту ПЛ или надводных кораблей (НК), где условия проведения работ стеснены и несравнимы с заводскими условиями с точки зрения оснащения инструментарием, диагностическим оборудованием и соответствующими стендами.
Модули полезной нагрузки могут существенно продлить жизненный цикл ПЛ, обеспечивая ее высокую эффективность в течение всего жизненного цикла, т.е. снимают ограничения, накладываемые устаревшими состоящими на вооружение системами оружия.
Наиболее критичным при анализе инженерных проблем является интерфейс между модулем и носителем. Для систем ПЛ эта проблема важна вдвойне, т.к. интерфейс должен быть сопрягаем в водной среде и, скорее всего, быть бесконтактным (т.е. соединение через воду) при очень незначительном вмешательстве оператора в ходе соединения и разъединения.
При проектировании интерфейса необходимо определить следующее:
– переходники через прочный корпус, обеспечивающие соединение систем внутри отсека с модулем полезной нагрузки (первый уровень) – этот интерфейс является критичным для живучести корабля, т.к. представляет собой устройство, нарушающее целостность прочного корпуса;
– структуру – средства и способы, с помощью которых модуль крепится к ПЛ, и полезная нагрузка может быть передана на борт;
– геометрию – расстановка и центровка модулей с учетом корпусных отверстий для всех глубин и искривлений конструкций носителя и совместимость с другими элементами системы, такими как уравнительные цистерны, системы пуска;
– интерфейсы, специфичные для полезной нагрузки. В том числе учитывающие техническое обслуживание, мониторинг и безопасность;
– подачу питания;
– линии связи;
– систему отстройки от вибрации и ударных нагрузок;
– систему жизнеобеспечения (если требуется подача воздуха).
|
Архитектурная компоновка подводных лодок в последние 50 лет оставалась почти постоянной, однако в перспективе она, по всей видимости, претерпит коренные изменения. |

При этом важно, чтобы архитектура корпуса обеспечивала не только простоту посадки модулей и его техническое обслуживание, но и способствовала увеличению их числа и используемых типов.
К примеру, сдвоенные прочные корпуса обеспечат значительное увеличение объемов между корпусами для размещения широкого набора типов модулей полезной нагрузки без каких-либо контейнеров в межбортовом пространстве с обтекаемыми выступами.
Как бы там ни было, стандартизованный модульный подход в значительной степени может упростить решение архитектурной задачи. Идеальный вариант решения архитектурной задачи – это полная развязка корпуса и модулей и обеспечение посадки стандартных модулей на спроектированный корпус.
Таким образом, разработка полезной нагрузки в значительной степени отвязывается от программы проектирования ПЛ, которая как бы получает новые модули за счет добавления их в свой реестр по мере готовности технологии.
Идеализированный вариант модульной ПЛ будет включать прочный корпус с целым рядом посадочных мест и разъемов с очень малым количеством забортных дополнений. Вся совокупность оборудования (включая присущее ПЛ оборудование, такое как основной движитель, рули, балластные системы) может затем быть спроектирована как заменяемые забортные модули. Это в максимальной степени повлияет на время технического обслуживания и стоимость содержания ПЛ в течение всего жизненного цикла.
Конечной целью является наличие малого флота с большими возможностями и умеренного по стоимости с широким диапазоном возможных изменений и существенной устойчивостью к устареванию боевых систем.
КОНЦЕПЦИИ НА ДАЛЬНЮЮ ПЕРСПЕКТИВУ (ПОСЛЕ 2073 ГОДА)
В дальней перспективе облик SSHN будет характеризоваться громадными размерами хранилищ в забортном пространстве, которые позволят снизить число и сложность интерфейсных систем.
Планируется, что варианты контейнеров (модулей) полезной нагрузки должны будут иметь следующее функциональное предназначение, определяемое конкретным оборудованием и оружием:
1. Решение задач противолодочной обороны (в том числе с применением выставляемых гидроакустических антенн, излучателей и АПА).
2. Осуществление ударных действий с использованием тактических и стратегических ракет.
3. Возможность действий против НК (в том числе и с применением АПА).
4. Возможность обнаружения, наблюдения, обработки данных, разведки и связи (в том числе и с применением автономных и дистанционно управляемых ПА).
5. Выполнение всего набора действий при доставке пловцов (в том числе наличие подводного аппарата и декомпрессионной камеры).
6. Осуществление противоминных операций.
7. Осуществление гидрографического наблюдения (в том числе с применением АПА).
8. Осуществление океанографического наблюдения (различные датчики, в том числе и применение в этом качестве АПА).
9. Осуществление развертывания радиогидроакустических буев и АПА для выполнения роли шлюза в сетевых системах.
10. Использование средств докования, подзарядки АБ, увеличивающих автономность аппарата.
Концептуальный аппарат должен будет иметь стандартный корпус, систему командования и управления, соответствующий движитель и место для полезной нагрузки.
Архитектуру и компоновку SSHN планируется организовать так, чтобы модули с аппаратами можно было спускать в отсек с пирса или транспортного судна, стоящего у борта, для того, чтобы затем состыковать их с SSHN сверху и снизу.
Проведенный анализ развития подводных лодок и подводных аппаратов в ведущих зарубежных странах позволяет сделать вывод, что аппараты являются средствами, которые могут выполнять не только задачу борьбы с минами, но и осуществлять боевые операции, находясь на большом расстоянии от носителя, и могут способствовать расширению зоны боевого воздействия боевых кораблей. При этом необходимо отметить, что аппараты можно запускать и с берега, что позволяет решать многие задачи оборонительного характера, в том числе задачу ПЛО и борьбу с десантными кораблями. Весьма перспективным и многообещающим направлением является модификация и подгонка аппаратов для посадки на борт существующих проектов ПЛ. При этом наиболее существенным ограничением, существующим сегодня, является 533-мм ТА и вертикальные пусковые установки и их системы управления пуском, что естественным образом стимулирует желание упростить и автоматизировать все процедуры в работе средств пуска и возврата, а также технического обслуживания аппаратов в сухом и доступном окружении.
Анализ концепций на дальнюю перспективу показывает, что имеется потенциал при обращении к некоторым ценным идеям и адаптации их через модульность и значительное расширение реконфигурируемого внешнего пространства ПЛ. Однако при этом остаются нерешенные проблемы, например, обеспечение приемлемой длительности внешнего хранения аппаратов. С позиции проработки архитектуры ПЛ проблемными являются следующие классические области:
– концептуальное проектирование;
– умение справляться с проблемами массы, плавучести, влияния гидродинамики, вывески и дифферентовки, запаса плавучести;
– архитектурного построения и компоновки;
– водонепроницаемой интеграции (особенно в ходе проведения операций при выпуске и стыковке);
– структурное проектирование;
– гидродинамика, форма корпуса и сигнатура;
– маневрирование и управляемость (особенно при приеме и выпуске).
В результате применения аппаратов с борта ПЛ она приобретает боевой потенциал, который провоцирует отход от сегодняшней архитектурной компоновки, которая очень незначительно менялась в последние 50 лет.
Валерий Петрович СПИРИДОНОВ – капитан 1-го ранга в отставке, кандидат технических наук, старший научный сотрудник, ведущий научный сотрудник НИО Министерства обороны РФ