|
|
Гидроакустическая система «Дельфин». |

|
Как мы уже не раз отмечали, Научно-исследовательский институт при- боростроения имени В.В. Тихомирова ведет разработки средств локации для диаметрально противоположных по своему назначению средств вооруженной борьбы, а также пространств – воздушного и подводного. Наиболее известные достижения НИИП относятся к наземно-воздушной среде – это РЛС для самолетов и комплексов ПВО. Однако в настоящее время в работе специалистов института наметился прорыв в сфере гидролокации – принципиально новая технология сверхширокополосных сигналов вот-вот «выстрелит» в подводном пространстве. |
Первой завершенной разработкой в этом направлении стал гидроакустический комплекс «Неман-ШПС» (подробнее см. «Национальная оборона» №8/2020). На площадке форума «Армия-2020» в г. Севастополе была продемонстрирована новая система мониторинга подводного пространства – «Дельфин», построенная с использованием технологии сверхширокополосных (СШП) зондирующих сигналов. Система предназначена для защиты объектов, расположенных в прибрежной зоне, либо судов, стоящих у причала или на якоре. На месте, прямо в рамках региональной, севастопольской программы МВТФ «Армия-2020», представителям Федеральной службы охраны и радиотехнической службы ВМФ ЧФ была продемонстрирована возможность полностью перекрыть пролив шириной около 250 метров.
Система «Дельфин» представляет собой герметичный цилиндр, внутри которого расположена приемо-передающая аппаратура. Питание на нее передается по кабелю с автономного источника питания, а полученная информация поступает по кабелю Ethernet. На внешней поверхности цилиндра закреплены акустические антенны. В таком исполнении система может быть статично закреплена в прибрежных водах либо спускаться за борт неподвижного корабля и использоваться для обнаружения приближающихся подводных объектов: аквалангистов, обитаемых или беспилотных аппаратов.
В дальнейшем нет никаких препятствий для размещения «Дельфина» на борту автономного необитаемого подводного аппарата (АНПА) или беспилотного катера.
Функции, которые на сегодняшний день может выполнять система мониторинга подводного пространства «Дельфин», таковы:
• объектовая охрана;
• охрана корабля;
• поиск подводных объектов в составе АНПА или иного беспилотного плавсредства;
• охрана заданной акватории.
|
Экспозиция НИИП им. В.В. Тихомирова на площадке форума «Армия-2020» в Севастополе. |
Блок приемо-передачи этого гидролокатора генерирует сверх-широкополосный зондирующий сигнал, что позволяет получить разрешение по наклонной дальности, соответствующее разрешению по наклонной дальности современного высокочастотного гидролокатора (порядка 1 см), а энергетическая дальность действия у «Дельфина» – как у современных низкочастотных гидролокаторов, не менее 800 м. Неоспоримым преимуществом гидролокаторов, построенных по технологии СШП сигналов, является возможность их применения на мелководье – диапазон рабочих глубин «Дельфина» начинается с 1 метра. В ходе проводившихся в августе 2020 г. испытаний специалистами АО «НИИП» на полигоне института на Москве-реке с ее глубиной 3-5 метров была получена дальность обнаружения пловца 380 метров. Важно отметить, что такой результат был достигнут при обнаружении аквалангиста со снаряжением с замкнутой схемой работы. В гидролокации такая цель считается сложной, при этом обычно обнаруживается не сам пловец, а пузырьки воздуха, которых у акваланга с замкнутой схемой работы нет.
Это лишь те сведения о системе мониторинга подводного пространства «Дельфин», которые на сегодняшний день могут быть обнародованы. По понятным причинам более подробная информация пока носит конфиденциальный характер. Известно, что наши заокеанские «партнеры» также ведут исследования и разработки по направлению гидролокации со сверхширокополосными зондирующими сигналами, но уже несколько лет, как, например, в США, фактически прекратились открытые публикации в научных и специализированных изданиях по этой теме. А это может означать, что американцы достигли определенных результатов и дело идет к выходу гидроакустических комплексов с технологией СШП зондирующих сигналов на этап серийного производства.
|
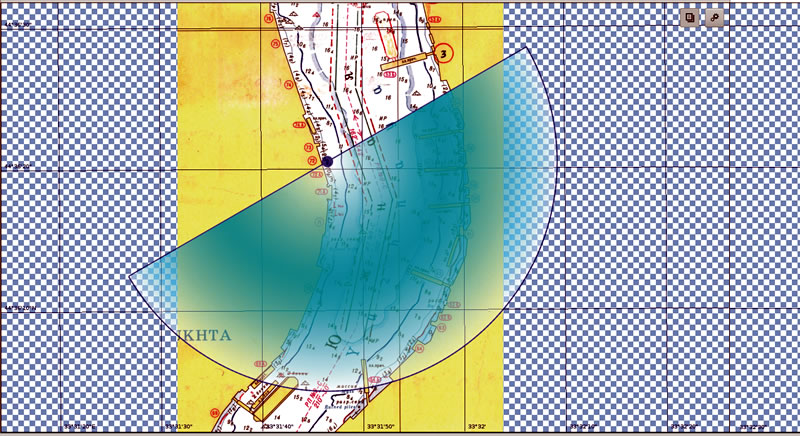
Карта акватории и зоны обзора ГАС «Дельфин» в ходе испытаний в Севастополе. |
А стоит так уж гнаться за новой технологией, если комбинация гидролокаторов с традиционной технологией в принципе дает примерно те же результаты? Ответ простой – однозначно стоит. Дело в том, что на борту, скажем, надводного боевого корабля размещается целый ряд гидроакустических систем. Это и гидролокаторы, и эхолоты, и связь. Для того чтобы они работали одновременно и не мешали друг другу, приходится разносить их сигналы по частоте – такое решение еще в 1930-е гг. предложил наш известный ученый Дмитрий Васильевич Агеев. Еще один вариант – это разнесение сигналов по времени. Однако для военных нужд такой способ практически неприемлем, поскольку разнородные боевые и вспомогательные задачи в большинстве случаев приходится решать в одно и то же время. При этом у разных гидроакустических систем, нацеленных на решение конкретных задач, есть свои оптимальные частоты, но при разнесении по частоте какая-то аппаратура работает при оптимальных условиях, а какая-то – нет. То есть в целом параметры работы гидроакустического комплекса корабля находятся на более низком уровне. А при использовании технологии сверхширокополосного зондирующего сигнала вся аппаратура может работать одновременно, не мешая друг другу.
Не менее важный параметр – обеспечение помехоустойчивости и скрытности работы гидроакустических систем. На сегодняшний день в гидролокации широко применяются сигналы с частотной модуляцией – это сигналы с линейной (ЛЧМ) или гиперболической (ГЧМ) модуляцией. И эти сигналы формируются по известным законам. Для современных средств противодействия выявить ширину полосы пропускания таких сигналов и поставить им помехи не представляет проблемы. А подавить сверхширокополосный сигнал с хаотической частотной модуляцией средства противодействия практически не могут, поскольку процесс его формирования противнику неизвестен. При этом приемник устроен так, что принимает только тот хаотический сигнал, который сформирован передатчиком того локатора, в который они оба объединены.
Специалисты НИИП имени В.В. Тихомирова провели ряд экспериментов по воздействию на хаотический сверхширокополосный сигнал традиционным, узкополосным сложным сигналом. При этом антенну локатора – постановщика помех ставили рядом с целью. В результате видели и цель, и помеху, то есть помеха не ухудшила характеристики работы гидроакустической системы с хаотическим СШП зондирующим сигналом.
|
Севастополь. Испытания гидроакустической системы «Дельфин». |

Еще один важный момент – скрытность работы гидролокатора. Самый простой вариант наращивания дальности действия гидроакустической системы – повышение мощности излучения. Но при таком подходе добиться скрытности ее работы невозможно, поскольку гидролокатор большой мощности легко обнаруживается противником. Важнее не высокая мощность, а энергия сигнала. Она равна мощности, помноженной на время излучения. Сигнал с маленькой мощностью можно излучать длительное время и получать в итоге большую энергию сигнала. И тогда противник может вообще не различить этот сигнал на фоне шума, а шумы в океане есть всегда. Поэтому при использовании такого сигнала противник для нас будет виден, а мы для него – нет. У гидролокаторов, построенных по СШП технологии, возможности по обеспечению скрытной работы весьма широки.
Технология СШП сигнала позволяет не только обнаруживать различные подводные объекты, но и обеспечивать подводную связь. Вся сегодняшняя гидроакустическая система связи – это та же радиосвязь, перенесенная под воду. Но не все типы сигналов, которые хорошо работают в атмосфере, так же хорошо работают и под водой. В радиолокации и радиосвязи электромагнитная волна распространяется со скоростью света – 300 тыс. метров в секунду. А у акустической волны под водой скорость распространения – всего 1500 метров в секунду. Поэтому под водой можно передавать на несколько порядков меньше информации, чем в атмосфере: сегодня скорость в несколько килобит в секунду считается хорошим показателем. А гидролокатор с хаотическим сверхширокополосным сигналом позволяет достигать скорости до десятков – сотен килобит в секунду.
Специалисты НИИП имени В.В. Тихомирова развивают технологию сверхширокополосных сигналов в гидролокации уже около 10 лет. За это время пройден путь от первых лабораторных экспериментов, внутренних научно-исследовательских работ, опытов на полигоне до создания первых финальных образцов гидроакустических систем. Это открывает дорогу для полноценного внедрения гидроакустических комплексов нового поколения в интересах силовых структур.