|
В последнее время в российских и зарубежных вооруженных силах резко возрос спрос на гиростабилизированные системы или компоненты систем с гироскопической стабилизацией. |
Это обусловлено множеством факторов (снижением цен при повышении точностных и отказоустойчивых характерис-тик комплектующих, общими тенденциями развития войсковых сис-тем управления и наблюдения и т.д.). Активно ведутся работы как по разработке новых гиростабилизированных оптико-электронных и радиолокационных систем, так и по модернизации существующих (например, с переходом от косвенной стабилизации к гироскопической). Если с процессом модернизации все более или менее понятно – перевести систему на гиростабилизированную платформу, скорее всего, поручат предприятию, специализирующемуся на решении подобных задач, то с разработкой новых систем ситуация сложнее. Уже не единичны примеры, когда разработка той или иной гиростабилизированной системы «пробуксовывает», ставя под угрозу сложные и важные военно-технические проекты. Понятно, что причин можно привести достаточно – это и последствия упадка российской высокоточной техники, и недостатки базовых электронных компонентов, и пр. Однако немаловажным, а скорее основным, фактором служит схема исполнения заказа, которая зачастую формируется неэффективно.
|
Рис. 1 |
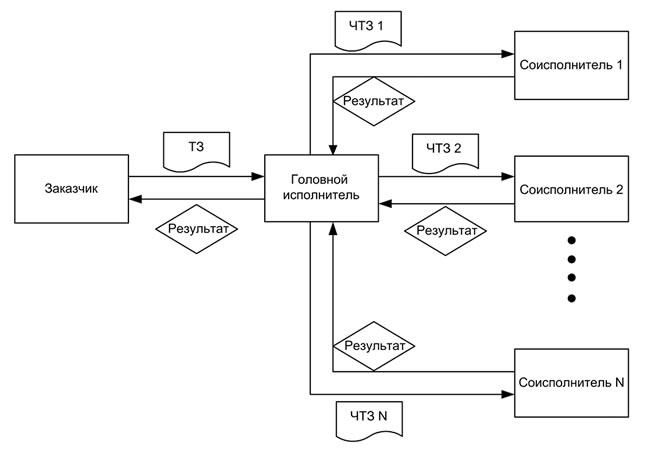
Сложившаяся схема
На примере разработки некой новой ракеты с оптической головкой самонаведения рассмотрим обычно складывающуюся схему разработки продукции. Укрупненно она выглядит примерно так:
1. Заказчик разрабатывает ТЗ на новую ракету с оптической головкой самонаведения.
2. ТЗ передается головному исполнителю, который разбивает его на подсистемы, формулирует частное техническое задание (ЧТЗ), и распределяет их между собой и соисполнителями.
3. Этап разработки, доработки, испытания и т.д.
4. Головной исполнитель получает результаты работы соисполнителей, соединяет все вместе.
5. Головной исполнитель сдает проект заказчику.
В целом схема (рис. 1) выглядит логичной, да и ничего другого тут придумать нельзя. Однако если углубиться и более подробно остановиться на выборе головным исполнителем соисполнителя по конкретному модулю «оптическая головка самонаведения», возникает ситуация, когда на эту роль выбирают предприятие, занимающееся оптикой. Это понятно, головка же «оптическая», при этом не учитывается, что львиную долю функционала «головки» выполняет гиростабилизированная платформа. Именно платформа обеспечивает захват ракетой цели, наведение, корректировку траектории. Соответственно, от качества ее исполнения, в первую очередь, будет зависеть насколько хорошо «головка» исполнит свои функции, оптика же уходит на второй план. В качестве телевизионной камеры можно выбрать прибор, который в состоянии покоя будет видеть цель на дальности 30-40 км, но в условиях движения и вибраций, при плохой стабилизации, все, что увидит камера – это смазанную непригодную для работы картинку. К сожалению, понимания этой взаимосвязи нет. Соисполнителем назначается «оптическое предприятие», и дальше заказчик (головной исполнитель) сталкивается с рядом проблем:
1. Угрозой полного срыва проекта (в части невыполнения основных требований по точности, динамическим характеристикам и т.д.).
2. Множественными доработками.
3. Затягиванием сроков.
Первые две проблемы обычно возникают при желании «оптического» предприятия самостоятельно заняться разработкой гироплатформы. Не обладая необходимым опытом в гироскопии, предприятие неминуемо сталкивается с множеством трудностей, и в большинстве своем результаты самостоятельной разработки или совершенно не удовлетворяют заказчика (головного исполнителя) или требуют дальнейших длительных доработок. Упорство в самостоятельной разработке силами «оптического» предприятия, скорее всего, приведет к полному закрытию проекта или его частичному пересмотру.
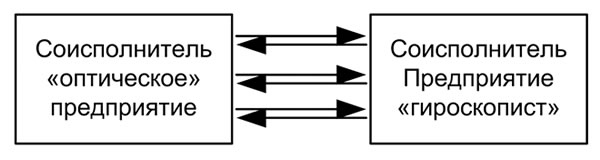
Логичный шаг со стороны «оптического» предприятия (сразу или после собственной неудачной попытки) обратиться к разработчикам, изначально специализирующимся на гиростабилизированной технике. В этом случае выстроится следующая цепочка (рис. 2).
|
Рис. 2 |

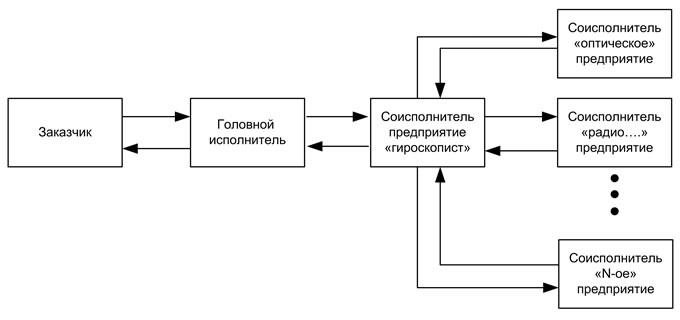
Кажется, что задача решена. Однако при такой схеме проблема «множественных доработок» спускается на уровень соисполнителей, и заказчик ее не наблюдает, но следствие этой проблемы в виде затягивания сроков остается (рис. 3).
Являясь в связке соисполнителей головным и решая, прежде всего, собственные задачи, «оптическое» предприятие вступает с «гироскопистами» в длительный процесс итераций, подгонок и доработок.
Кстати, все подобные неудачи могут быть связаны не только с непосредственной работой «оптического» предприятия, но и с тем, что головной исполнитель сформулировал в ЧТЗ заведомо невыполнимые (по физическим или конструктивным ограничениям) требования, а соисполнитель, вовремя это не разглядев, что называется: «подписался по полной».
|
Рис. 3 |
Эффективная схема
Говоря про эффективную схему разработки военных, а в ряде случаев и гражданских гиростабилизированных систем, необходимо отметить, что если дело дошло до необходимости гиростабилизации, то, скорее всего, именно на нее возлагаются критичные для всей системы функции. Какой блок будет в итоге стабилизирован не так уж важно. На первый план выходят: точность наведения, скорость реакции, динамика, предельные углы поворота – в общем, параметры, характеризующие гироплатформу. Соответственно схема должна выстраиваться таким образом, чтобы именно предприятие, занимающееся гиростабилизацией, было ведущим при разработке подобной системы и уже само привлекало нужных ему соисполнителей, определяя требуемые характеристики стабилизируемых приборов. Обладая необходимым опытом, подобное предприятие еще на этапе формулирования ЧТЗ сможет выявить «узкие» места, внести свои предложения и корректировки, в конечном счете, ответственно заявить, что какие-то вещи реализовать невозможно. В данном случае речь идет о выполнении совместной оптимизации структуры и характеристик информационных каналов (оптических, радиолокационных, комбинированных и т.д.) и контуров стабилизации и управления гиростабилизированной платформы (рис. 4).
|
Рис. 4 |
Обращаясь к приведенному выше примеру оптической головки самонаведения – подбирать оптимальные ТВ или ТПВ камеры на этапе разработки гироплатформы для головки самонаведения проще, чем подгонять эту платформу под уже выбранную камеру. При подобном подходе к минимуму сводятся риски неисполнения проекта, неполного выполнения требований, а также снижаются временные затраты и гарантируется более качественный результат.
Леонид Васильевич МОСКОВЧЕНКО – генеральный директор, генеральный конструктор ОАО «НПО «Карат»
Артем Леонидович МОСКОВЧЕНКО – первый заместитель генерального директора
Антон Сергеевич ВЛАСОВ – начальник отдела рекламы